Compact humanoid robot designed for research, education, and AI development with high agility and dexterity.
Unitree Robotics
2024
China
$16,000
Humanoid
Research
Available
Verified
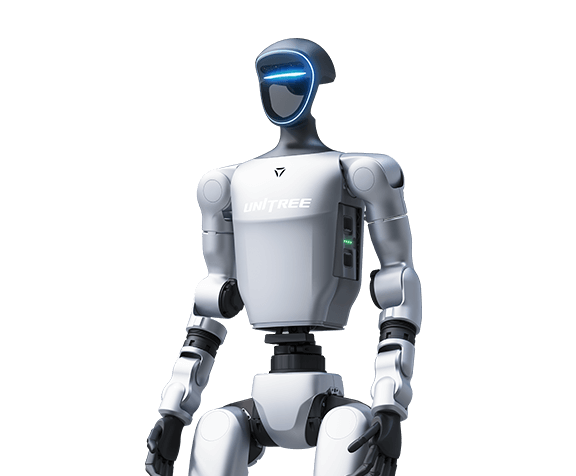
The Unitree G1 is a compact humanoid robot developed by Unitree Robotics, designed primarily for research, education, and AI development. It stands at approximately 1.3 meters tall and weighs around 35 kilograms, making it significantly more portable than full-size humanoid robots while still retaining advanced mobility and manipulation capabilities.
The robot features a modular architecture with 23 to 43 degrees of freedom depending on configuration, allowing it to perform complex, human-like movements. Its joints enable coordinated walking, balancing, and manipulation tasks, while optional dexterous hands provide fine motor control for handling objects with precision.
Unitree G1 is equipped with a perception system that includes 3D LiDAR and depth cameras, enabling environmental awareness, obstacle detection, and navigation in real-world settings. Combined with onboard computing and AI capabilities, the robot can support autonomous behaviors and advanced robotics research workflows.
The robot achieves walking speeds of up to approximately 2 meters per second and supports dynamic locomotion such as stair climbing and agile movement. Its foldable design allows it to be compactly stored or transported, enhancing its usability in laboratories and field environments.
Powered by a rechargeable lithium battery system, the Unitree G1 typically operates for around two hours on a single charge. The platform supports modern development ecosystems, including ROS-based workflows and SDKs for Python and C++, making it suitable for experimentation, simulation, and deployment of AI-driven robotics applications.
The G1 is positioned as an accessible humanoid platform compared to larger industrial robots, offering a balance between affordability, flexibility, and performance. It is widely used in research labs, educational institutions, and development environments where experimentation with humanoid locomotion, manipulation, and artificial intelligence is required.
Dynamic walking
Stair climbing
Object manipulation
Dexterous grasping
Self-balancing
1 reviews
Aryan Kumawat
May 12, 2026
5.0
Want it
100%
Verified purchase
0%